HawkEye鷹眼三維激光識別器是基于雙目結構光,采用激光振鏡投影,大幅面圖形獲取,AI 算法瞬間完成4㎡區域的零件識別;滿足防錯漏要求,一個“鷹眼”完成多零件錯漏識別。
此次通過“電池殼拉鉚有無檢測”來檢驗產品性能的升級。
詳細參數:
檢測設備 :HawkEye鷹眼三維激光識別器 主機:i7十二代處理器(僅使用CPU計算)
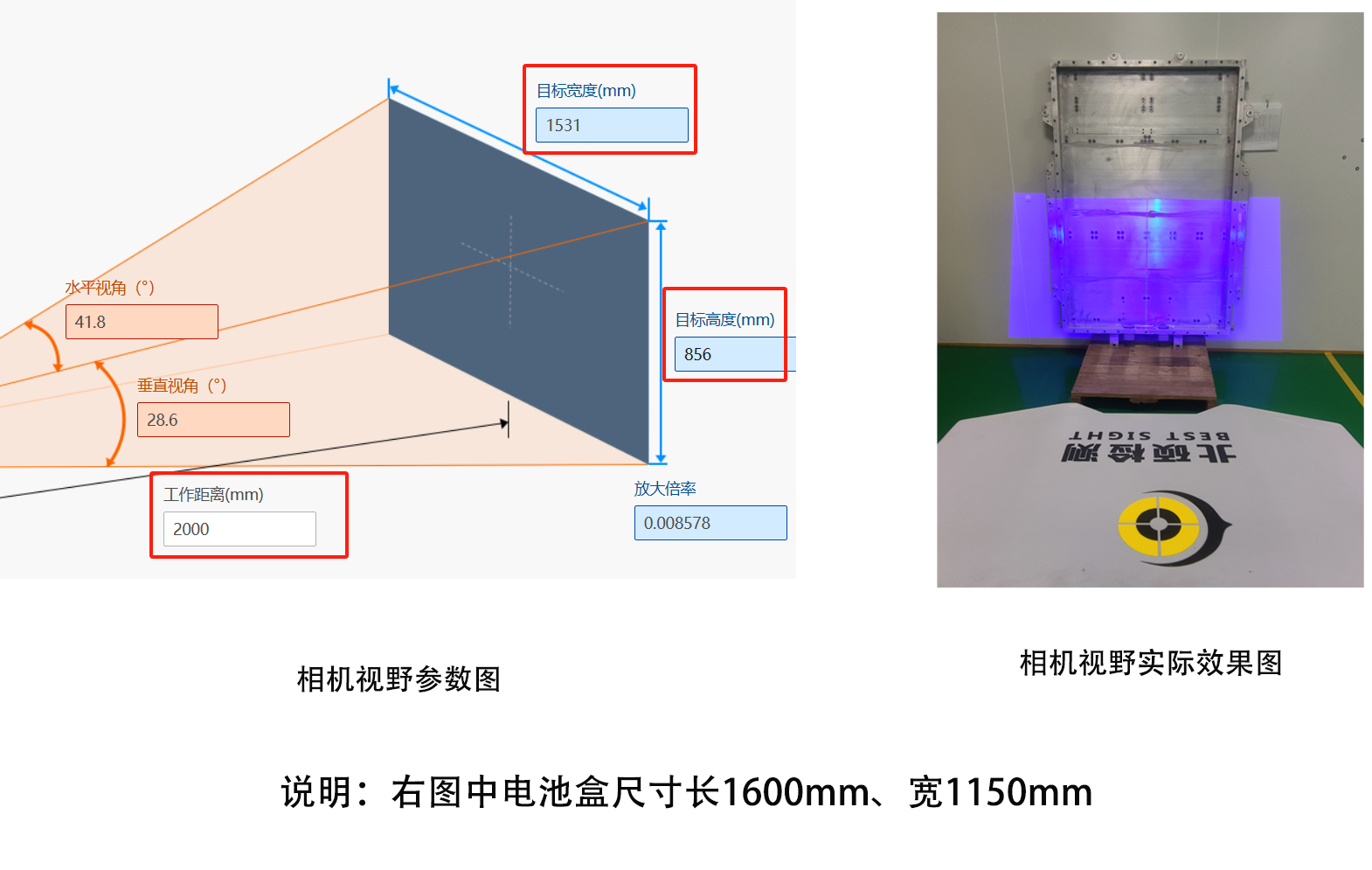
檢測零件:電池殼、夾具等 檢測內容: 有無檢測拍照距離:2000mm 拍照范圍(最優):長 1531mm,寬856mm
點云間距:0.35mm左右 點云數量:一千萬個點(單個相機單次拍照) 拍照時間(包含點云生成):小于6s
測點計算:小于300ms 可以檢測有無的尺寸:零件肉厚≥2mm,同時高度≥2mm。
案例:電池殼拉鉚有無檢測
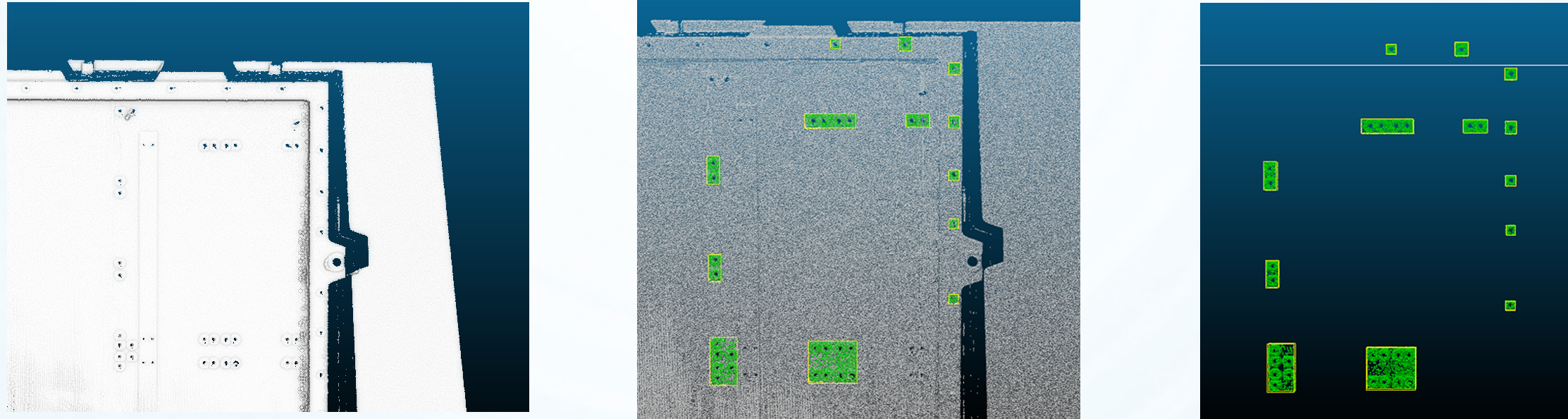
點云質量和算法計算如下圖所示:
電池殼定位要求:
為保證拉鉚區域選擇的有效性,要求待檢測的電池殼上拉鉚的位置誤差在±5mm以內。定位誤差與拉鉚的間隔大小和尺寸大小有關。
相機拍攝要求:
待檢測零件應該處于最佳視野范圍內,同時零件拍照距離與標定時的距離越接近效果越好。零件上方需保證沒有直射光源,否則會影響拍照效果。
算法說明:
采用點云平面分割的方式,根據底部平面來分割出拉鉚的上表面區域,再計算點云體積,算法上穩定可靠,魯棒性好。
節拍說明:
1、單次拍照6s左右,多次拍照10s左右;
2、拍照生成點云時如果使用GPU加速,同時縮小點云目標區域包圍盒大小,減少點云數量,單次拍照生成點云的時間可縮短至4-5s,同時測點計算效率也會增加;
